
Spaces
Spaces are a way to modularize your assistant that increases isolation between subparts and classification performance for intents and entities that are only relevant in specific contexts.
New in 3.6.0a1
This is an alpha release. This alpha release will allow us to gather feedback from our users and integrate it into future releases. We encourage you to try this out! The functionality of this alpha release might change in the future. If you have feedback (positive or negative) please share it with us via your support contact.
Feature Not Yet CALM-Compatible
This feature is currently not compatible with CALM. We are working to ensure future integration and compatibility.
Spaces are a way to modularize your assistant. As assistants grow in scale and scope, the potential for conflicts between intents, entities, and other primitives grows as well. That is because in a regular rasa assistant all intents, entities, and actions are available at any time, giving the assistant more choices to distinguish between the more that gets added. Spaces provide a basic separation between parts of the bot through the activation and deactivation of groups of rasa primitives. Each of these groups is called a Space. Spaces are activated when certain designated intents, called entry intents, are predicted. With the activation of a Space, all the primitives for the Space become available for subsequent interactions with the user. Good ways to think about spaces are
- that they allow you to specify follow-up primitives, which only become accessible after another intent has come beforehand
- that they are like multiple sub-bots merged into one with the possibility of sharing primitives
When to use Spaces
Spaces can be helpful when you are dealing with multiple domains of your business in a single assistant. Oftentimes, this leads to multitude of forms, entities, and inform intents that start to overlap at some point. Form filling and inform intents are a typical case of having this follow-up structure mentioned above. Another good case is when you want to be able to define different behavior for help- or clarification requests based on the subdomain or process the user is in. This is technically possible today with stories, but it can be cumbersome to describe the full event horizon for every interaction route.
When not to use Spaces / Limitations
Because spaces split a rasa bot into multiple parts, it is interacting with almost every of the existing features of rasa. We made it work with almost all of them, but there are some exceptions. This means, however, if you have created customization beyond components that are aligned with the way rasa normally works, spaces might not work for you.
Another important limitation is that spaces currently do not support stories. We know
this is a big limitations for many existing bots. However, because stories and their
existing policies work with a fixed event horizon (max_history), they are at this
point not compatible with the idea of being able to describe encapsulated units of logic
well.
Currently, the only entity extractor that is works with the boundaries that spaces
create, is an adapted version of the CRFEntityExtractor. You can find more on this
in the following sections.
An example spaces bot
We have created a bot using spaces for you to look at, learn from and experiment with. It features three different spaces in the financial domain. Here is the repository
How to use spaces
Spaces are defined by separate sets of domain, nlu, and rule files. These separate
sets are then assembled to create a unified assistant. The assembly plan needs to be
added to the config.yml using the newly introduces spaces key. Second, you need
to use a special data importer that reads and enacts the assembly plan. Third, you need
to add some specific space-aware components to your NLU pipeline. The following is the
config.yml of the financial spaces bot linked above:
In the above config file, you can see the Spaces definition with the main space, which is a designated name for a space for shared primitives, and the three subspaces for transferring money, investment, and credit card payments. The main space is not required, but the only way to share primitives between spaces. Each path value can either point to a single file or a directory.
Second, you can also see the importer
rasa_plus.spaces.space_data_importer.SpaceDataImporter being used. This importer
reads the above spaces definition and assembles the bot. The results can be seen in the
temporary working directory.
Third, you can see the specific NLU components that are necessary to make spaces work.
The most important is the FilterAndRerank component which is central to make spaces
work by post-processing intent rankings and entity extractions. If you also need entity
extraction you need to use the SpacesCRFEntityExtractor to make that work with spaces.
Finally, you can see that we are only using the RulePolicy here.
After you have created your spaces and made adjustments to the config.yml, you can
train your new assistant using rasa train -c config.yml and start it afterward with
rasa shell.
Training only a specific subspace
We have added --space argument to the rasa train command to give you the option to
only train one specific subspace:
rasa train -> trains the full assistant with all spaces
rasa train --space investment -> trains an assistant only containing the investment and the main space
Other commands were not adjusted as they use trained assistants as inputs.
How do spaces work?
In the following we'll look at how things work under the hood in spaces to give you a better understanding of what is happening in case you should need it.
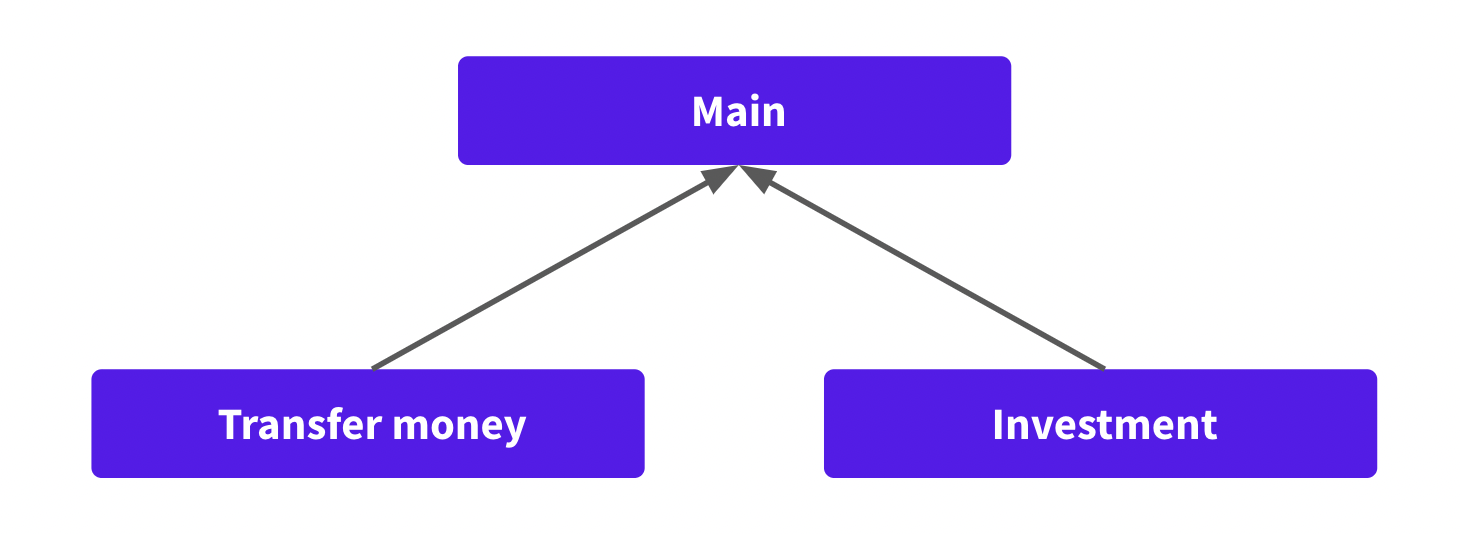
One of the most aspects is that spaces form a hierarchy with two layers. At the top is the main space which contains shared primitives that should be usable by all spaces. The main space is always active. Anything that is defined in a subspace, can only be used by that space and not by other subspaces or the main space.
What happens during the assembly?
The most important step during the assembly is the prefixing. During this step every
intent, entity, slot, action, form, utterance that is defined in a space's domain file
is prefixed (infixed for utterances) with this space's name. For example, an intent
ask_transfer_charge in the transfer_money domain would become
transfer_money.ask_transfer_charge and every reference of this intent would be
adjusted. The final assistant then works on the prefixed data.
An exception to this is the main space. Anything in the main space and all its primitives that are used in other spaces, will not be prefixed.
Another exception are rules. They don't have a name that can be prefixed. Instead, we add a condition to each rule that it is only applicable while it's space is active.
How is space activation tracked?
A space is activated when any of their entry intents is predicted. A space can have multiple entry intents. However, only a single space can be active at a given time. So when space A is active and an entry intent of space B is predicted, space A will be deactivated and space B is active from now on.
Space activation is tracked through slots that are automatically generated during assembly.
How does filter and rerank work?
The filter and rerank component post-processes the intent ranking of the intent classification components. It accesses the tracker and checks which space are active or would be activated, in case an entry intent is at the top.
It then removes any intents from the ranking that are not possible. Further it also removes any entities that are not possible given the space activation status or about to be predicted entry intents.
How does entity recognition work differently?
Usually, entity recognizers in Rasa only return a single label per token in a message.
Thus, there is no ranking, that could be post-processed as in the case of intents. We
have built our SpacesCRFEntityExtractor in a way that it creates multiple extractors.
One for each space. Now, during the post-processing step, we can filter out the
extractor of the spaces that are not activated.
Custom Actions
Custom actions work as before. However, the tracker, the domain, and slots will be stripped of any information from other spaces before being handed to your action. Additionally, every event such as slot sets, will be prefixed after they are returned by your action. All of this ensures that from the view point of your custom action, you don't need to worry about the other spaces and accidentally leaking or altering information. This warrants isolation between your Spaces. Note that custom actions from the main spaces are not inherited by subspaces.
Response Selection
Response selection works as before. The only small difference is that in your
config.yaml you'll need to specify the retrieval intent including it's final prefix.
If your retrieval intent is investment_faq in the investment space, then in your
config you'll need to set investment.investment_faq as the retrieval intent. If the
retrieval intent belongs to the main space, no prefix is added. That's why
, in this case, during the definition of the retrieval intent, no prefixing is necessary.
Lookup tables and Synonyms
Lookup Tables and Synonyms work with spaces. However, they are not truly isolated between spaces. So there can be some unanticipated interactions. For synonyms, specifically:
- Assume two spaces define the same synonym. Space A: "IB" -> "Instant banking". Space B: "IB"-> "iron bank". A warning is given that one value overwrites the other.
- A similar thing can happen if "IB" is an entity in both spaces but only one defines it a synonym. Any entity with value IB will always be mapped to that synonym no matter which space is active.
For lookup tables no adverse interactions are known.
Training Data Importers
Using the --data command line argument you can specify where Rasa should look
for training data on your disk. Rasa then loads any potential training files and uses
them to train your assistant.
If needed, you can also customize how Rasa imports training data. Potential use cases for this might be:
using a custom parser to load training data in other formats
using different approaches to collect training data (e.g. loading them from different resources)
You can write a custom importer and instruct Rasa to use it by adding the section
importers to your configuration file and specifying the importer with its
full class path:
The name key is used to determine which importer should be loaded. Any extra
parameters are passed as constructor arguments to the loaded importer.
tip
You can specify multiple importers. Rasa will automatically merge their results.
RasaFileImporter (default)
By default Rasa uses the importer RasaFileImporter. If you want to use it on its
own, you don't have to specify anything in your configuration file.
If you want to use it together with other importers, add it to your
configuration file:
MultiProjectImporter (experimental)
New in 1.3
This feature is currently experimental and might change or be removed in the future. Share your feedback on it in the forum to help us making this feature ready for production.
With this importer you can train a model by combining multiple reusable Rasa projects. You might, for example, handle chitchat with one project and greet your users with another. These projects can be developed in isolation, and then combined when you train your assistant.
For example, consider the following directory structure:
Here the contextual AI assistant imports the ChitchatBot project which in turn
imports the GreetBot project. Project imports are defined in the configuration files of
each project.
To instruct Rasa to use the MultiProjectImporter module, you need add it to the importers list in your root config.yml.
Then, in the same file, specify which projects you want to import by adding them to the imports list.
The configuration file of the ChitchatBot needs to reference GreetBot:
Since the GreetBot project does not specify further project to import, it doesn't need a config.yml.
Rasa uses paths relative from the configuration file to import projects. These can be anywhere on your filesystem where file access is permitted.
During the training process Rasa will import all required training files, combine them, and train a unified AI assistant. The training data is merged at runtime, so no additional training data files are created.
Policies and NLU Pipelines
Rasa will use the policy and NLU pipeline configuration of the root project directory during training. Policy and NLU configurations of imported projects will be ignored.
watch out for merging
Equal intents, entities, slots, responses, actions and forms will be merged,
e.g. if two projects have training data for an intent greet,
their training data will be combined.
Writing a Custom Importer
If you are writing a custom importer, this importer has to implement the interface of
TrainingDataImporter: